
My son is always willing to help me in building or disassembling any kind of stuff, so he was very enthusiastic when I told him about the plan to build a quadcopter from scratch (OK, almost from scratch). His only complaint was why we didn’t build an octa-copter or at least a hexacopter. I promised him that if this F450 would really fly, then we would get to build a more complex one, the Tarot 650PRO.
I was always interested in the “Do It Yourself” types of projects. I previously built some Arduino-based devices therefore building an Arducopter will not be something totally new for me. Just to brag, I also built my own audio system from the amplifier to the loudspeakers.
Building something from scratch takes a lot of research and patience. Especially for newbies is more convenient and safe to start with a quadcopter kit. But I have to say, that my next DIY quad will be probably from scratch. It’s also fun to choose the right parts, design the circuits, and build your own concept.
There are many quadcopter kits on the market, from affordable ones to more expensive professional ones. It is very difficult to choose the right one. Having some Arduino knowledge I was glad to receive a quadcopter kit built around the APM 2.8 flight controller.
F450 Flame Wheel review and build instruction
Initially, I contacted XT-Xinte regarding a new main-board for my X380 Quad but finally, I ended up with an ARF F450 kit. BTW, ARF means “Almost Ready to Fly”. They offered this quadcopter kit for free in order to make a step-by-step guide about how to assemble it.
In the beginning, I was very optimistic, I was sure that the F450 with APM 2.8 was a well-documented DIY quadcopter. Unfortunately, after several hours of internet research, I found only fractions of the building process. This would not be enough, the package doesn’t include any instructions about how to assemble the airframe or how to interconnect the flight controller with the RX module, ESCs, and motors. For those who are newbies in the DIY field this issue can be very scary :).
I received the package in 10 days, which is unusually fast for orders from China. All the parts below were precisely stuffed in a small cardboard box (25 x 25 x 25cm).
F450 DIY quadcopter kit – Parts list
- HJ450 nylon fiber frame kit aka F450 flame-wheel airframe;
- 1 set of 140 mm high landing skids;
- APM2.8 flight controller with case;
- 6M GPS with Compass L5883;
- Flysky FS-i6 6 channel transmitter (TX);
- Flysky FS-i6A 6CH receiver (RX);
- 2 pieces of CW brushless motors, D2212 920KV – JMT F15844;
- 2 pieces of CCW brushless motors, D2212 920KV – JMT F15843;
- 1 set of 30A electronic speed controllers (ESC);
- 1 set of 9443 propellers (2CW and 2CCW);
- 5 pieces of 10cm F-F servo extension wires;
- DJI GPS foldable antenna mount;
- Carbon fiber GoPro camera mount with damping balls;
- Hook & loop fastener;
- IMAX RC B3 Pro compact 2s and 3s balance battery charger;
- 11.1V 2200MAH 30C Li-Po battery;
- 3 bags of screws.
Be aware that the package does not include any tools. For assembling you will probably need a 2 mm hex wrench, small and medium Phillips screwdrivers, and a basic soldering iron.
Arducopter APM 2.8 flight controller
Over time, the APM flight controller received many hardware updates and the current version is 2.8.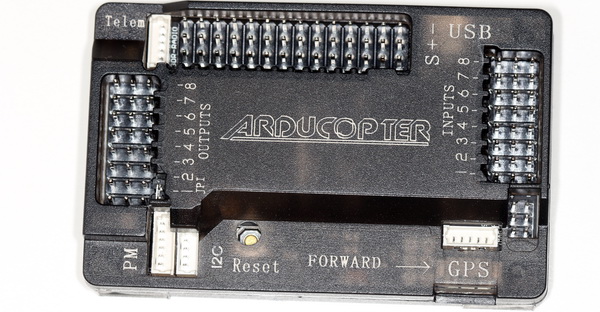
The APM 2.8 FC is based on the ATmega2560 CPU, which is a low power consumption 8-Bit microcontroller. A secondary ATMEGA32U2 AVR RISC-based microcontroller is used as PPM encoder. The flight controller also incorporates a 3-axis gyro\accelerometer sensor (MPU 6000) and a pressure sensor (MS5611).
Having 8 outputs, the Arducopter FC is suitable not just for quad-copters but also for Hexa and octa-copters.
One of the biggest advantages of this platform is great software support through the MissionPlanner app.
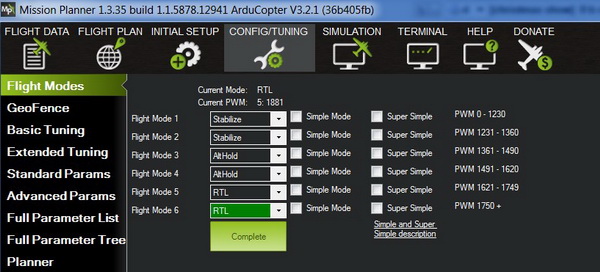
By default, the flight controller is configured with 6 different flight modes (Stabilize, Loiter, AltHold, RTL, Circle, and Auto), which can all be flagged with “super simple” and “simple mode”. You can find a detailed description of all the possible flight modes here.
The Ardcopter can be paired with many optional hardware like:
- Telemetry module for real-time monitoring of the flight parameters;
- Minim OSD for FPV flights;
- 3DR power module to monitor the battery voltage and current consumption;
- Optical flow sensor;
- Brushless and servo camera gimbals;
- Received Signal Strength Indication (RSSI);
- External status LEDs and Buzzer;
- Parachute;
- Retractable landing skids.
Flysky FS-i6A transmitter
The kit includes an entry-level 6-channel remote controller from FlySky, which in fact seems to be a copy of the Turnigy TGY-i6 transmitter. Frankly, I would have preferred a more complex one with more channels. The FC requires at least 5 channels (CH1-4: Roll, Pitch, Throttle, and Yaw; CH5: flight mode switch). Unfortunately, there is some interference between CH5 and CH6 so be careful during the flight modes assignment on the “SWC” switch. In order to control the tilt angle of my MiNi3D Pro brushless gimbal, I assigned the CH6 to the “VRA” knob.
Assembling the F450 Dlame Wheel airframe: Step 1
Before you start to assemble the frame, check and inspect again all the included parts. For example, the arms had some plastic residue from the production process, which could have prevented the correct installation of the motors. I recommend removing those residues from the motor base with a piece of sandpaper.
Basically, the F450 air-frame is formed out of 4 arms (2 red and 2 white) linked together by two boards (top – 450FBT and bottom 450 FBB). The bottom board also serves to interconnect the battery with the ESCs electronically.
In the first phase, attach and secure each arm with two screws to the bottom board (red arm in the front part). Next, you can install the top board. For this, you will need 4 screws for each component.
After you are done, I recommend labeling the arms from 1 to 4 exactly like in the image below (X-shaped quadcopter).
Installing and wiring the motors and ESCs – Step 2
As mine came with a battery connector and ESCs soldered to the power board, I had an easy job. Practically I had to install all the motors following the correct order (listed below) and interconnect them with the 30A ESCs (through the bullet connectors). The rotation direction of the motors can be simply reversed by switching two-wire connections from the existing three (between the ESCs and motors).
Motor/Propeller order and direction of rotation:
- Arm 1 (red) – CounterClockWise;
- Arm 2 (white) – CCW;
- Arm 3 (red) – ClockWise;
- Arm 4 (white) – CW;
Organize all the cables and make sure that the cables can not be cut accidentally by the propellers.
Mounting and wiring the Ardupilot APM 2.8 FC – Step 3
There are two different approaches regarding the location of the FC. It can be installed on the bottom board as well as on the top one. I opted for installing it on the top board for two reasons: I think this way the battery weight can be more easily distributed and I will have better access to the connection wires with the FC (in case I have to change something).
On top of the APM2.8 ArduPilot, there is an arrow showing the direction of its installation. Don’t miss this detail! To get the best results, I recommend the FC be positioned so that the internal Gyro sensor (MPU6000) is exactly in the center of the F450 airframe.
Each ESC servo cable should be connected to one of the output ports of the flight controller. If you listen to my previous instructions, you will find the correct order already labeled on the arms.
The next step is interconnecting the flight controller with the radio receiver using 5 servo cables.
The last step is to install and connect the GPS antenna to the Arducopter FC. That’s it! You’re done with the basic wiring.
Before the first tests, I do not recommend connecting other devices (like telemetry or camera gimbal) to the flight controller.
Once again, make sure that there are no wires or other parts in the way of the propellers.
First-time setup with Mission Planner – Step 4
Prior to interconnecting the FC with your computer using a micro-USB cable, you must install the MissionPlanner app. After you are connected, you can select from the “Initial setup” menu the “Mandatory Hardware Configuration” option or you can run the “MP setup Wizard”. You should consider checking in MP the following before your first flight:
- Frame type;
- Compass calibration;
- Transmitter calibration;
- Accelerometer calibration;
- RC Transmitter Mode Setup;
- ESC calibration;
- Default flight modes.
Safety measurement is mandatory to remove the propellers during any calibration process.
Testing the F450 quadcopter – Final step
Maybe I went a bit too deep into details and many of you could be bored by this tutorial so I will leave the testing part and my first flight experience with this DIY F450 quadcopter for a future article.

Hey! everyone, My name is Steve 19 year old from India. Finally, The Day came When I Received a Package From China on 26.08.2020 I’m new to it I’ve some Technical Skills. Let’s See What I do Next First of all I’ll show you What I Bought and what is Included in The F450 Quadcopter Kit.
hii i hav made same with naza mlite
450 frame
920kv motor
8045 prop
blheli esc
but my quad is not flying up i.e. taking off from the ground
plz answer me on odelaplace007 at gmail.com
I’m new to quadcopters but am doing research which heavily involves drones at my university. I’m looking for a kit where I can program the flight controller to do what I want it to, as well as a frame sturdy and strong enough to carry some more gear like a couple antennae and an altimeter. I want to be able to implement a ground station that can communicate with the copter to the point where I can input a height and it will go to that height (an altitude controller). Based on what I’ve read, this seems like it would be a good starter package for me to learn with, but I wanted to confirm with you if you think it’s a good fit? Also, does the GPS have to be implemented, or can it work without the GPS?
Any help or advice is much appreciated.
Thank you!
Thanks for the replied.
How to reset gyro.
I connected fc to pc with mission planner and done all the mandatory hardware configuration.
I didn’t change any settings. When it took off
In stabilise mode for a few seconds it flip over and crashed.
Any ideas.
Thanks
I also have the same configuration but unable fly stable. It flip over after a few second when took off.
Any idea?
Thanks
Alex
Hi Alex,
Mine worked natively, without any extra settings.
Did you connected the FC to your PC? Did you tried to reset gyro?
I have quadcopter F450 RTF assembled
Specification :
Main set size: 490mm x 490mm x 140mm
Diameter (length between two motors not adjacent): 450mm
Propeller size: 10x 4.5 CW &CCW
Take off weight: 850g
Safety take off weight: 1350g
Motor: 980KV brushless
ESC: Mystery 30A Simonk ESC
LiPo battery: Mystery 11.1v 2200mAh 35C
Flight board: MWC multicopter V2.0 (Gyro sensor*3)
Transmitter: Radio Link 2.4G 6CH transmitter+ receiver
Flying duration: 8-12 mins
Mystery B3 Charger
All in one (ready to fly)
Arm Color: Red/white/black/yellow
But i want to make it autonomous using APM FC. Is it possible to make it autonomous by just changing the Flight controller board by APM 2.8??
It is a firmware available on Ardupilot official site compatible with APM 2.8? If it is possible then how to connect ECS and receiver to FC board?
I haven’t any experience doing first time.
thanks
Excellent work!
I’m also working on my F450 DIY quad, but I want to use NASA flight controller instead of Arducopter APM 2.5
awesome project!
Can I add OSD to this ArduCopter???
Cheers,
Brandon
I just finished to build this F450 drone. Any recommendation before first flight?
Do I need to calibrate anything?
BTW, I replaced the props with DJI carbon fiber propellers. They look much better :)
Me too building one. But it flips in take off. Can you give your PID so I can start from there.
Thanks in advance !.
Hi Hari,
I used the default PIDs. I didn’t changed anything. It worked out of the box!
Did you tried to recalibrate it through APP??
Nice Article. Can you post “Testing the F450 quadcopter” as you mentioned in the article. I got stuck here.
I am buying a nicer high-end drone for my fiancee for Xmas, and I was curious if you could give me some advice as I know nothing about these. I am looking for something that he can assemble (DIY drone) and be creative with himself; so, not out of the box.
He will be a first timer, but is an engineer, inventor, and an enthusiast of all things hands on and build-able.
I have a budget of up to $2000. Any ideas or suggestions would be very welcome.
Thanks,
Lisa
Hi Lisa
In this budget you can buy good quality drone like Phantom 3 or 4, as phantom 4 starts from 2200
Or you can buy Parrot series of drone. There are other good drones in the market you can google but these what I mention are best.
Thanks
You have right, but Lisa asked about DIY quadcopters not RTF (ready to fly).
If he is truly a engineer and inventor, I recommend him the DJI Matrix 100. Which is a fully programmable quadcopter for developers.
Hi,
did you have some problem with the power for your receiver from APM?
I have about the same configuration but my receiver seems to get not enough power.
Great tutorial!
Where can i find this DIY quadcopter kit?
BTW, there is a newer APM flight controller which can I use?
Hi guys,
I am new to this multi-rotor domain. We are struggling with our first F450 quad. Below are the specs of the DIY quad kit:
1. F450 quadcopter airframe
2. KK2.1 Flight controller.
3. FLYSKY CT6B (6 CH 2.4G radio transmitter)
4. 1400 KV Brushless motors
5. 30 amps ESCs
6. Li-po battery
Firstly the quad was not taking off properly. More over, after activating self level mode also, the quad is not at all stable. If we max up the throttle, then it flips in one side and crashes. Otherwise, it takes off from the ground up-to 1-2 feet if we slowly increase the throttle and then oscillates and to avoid crash, we then decrease the throttle.
Please see the video ( https://www.youtube.com/watch?v=B_sNdiE7jt0) for more reference.
Please guys, really need your help in this matter. We are not able to understand exactly what is wrong with our quad.
We have already calibrated our ESC’s and the accelerometer but no luck.
Please help guys.
I would like to know, how did this kit fly? Did all the components work well?
It seems very inexpensive for a kit with an APM controller and GPS.
I want to order one but am on the fence until I get some feedback or flight test rviews for this kit.
Very nice write up! Thank you.
Somebody know how to interconnect the APM flight controller with the radio receiver fs – ia6 ?
Hi,
I’m trying to figure out how to wire the receiver (FS-iA6) with the APM2.8… Can somebody help me out with a scheme or a pic?
Hi!
Did you found out how to do this?
Regards, Fredrik
HI,
I was making the same project but can not calibrate the esc´s
Any information how i do that?
I have the same kit but i can not calibrate the ESC´s.
XT-Xinte ESC´s…
Not with all together, not with one on channel 3.
Any Information, how i do this?
Hi brother,
I just want to ask how do you power the APM, if u did not use the power module..
The APM flight controller is powered by the ESCs, without power module.
Meaning that u connected the esc’s to the APM and powered the power distribution board with the lipo? Does it did nt causes any damage ?
You connect the three wire cable coming from esc to the APM as this cable carry only 5v dc which is sufficient for fc.
You can use BEC for 5v direct from battery if you want. But this 3 wire cable gives you 5v.
Yes this is true. I also have a question. I have done the similar thing but mine is not balanced and drifting too much and cannot be stable. I tried to auto trim but still it goes here and there. Did you do any auto tune or trim?
Can you show your video how it flies at its first attempt
Hi Qazi and welcome on my quadcopter blog.
Here https://www.youtube.com/watch?v=avxUU91MqFw my first flight with this DIY F450 quad (no extra trim ore tune).
HI,
I was making the same project but was using fly sky 6 channel transmitter FSCT6B it has a toggle switch in channel 5 but it is of single button not like ur transmitter that yours have 3 layer toggle switch….can I switch flight mode with it if i want to use RTL OR altitude hold only one of these… PLZ REPLY AS SOON AS POSSIBLE
In my opinion, you can use one switch for alt hold and the other RTH. Run the mission planner and simulate the mode switch.
Thanks..
Nice Quadcopter build.